Question 21 CEL02 - Chief Engineer - Limited (Alt)
As shown in the illustrated electric propulsion control scheme for a twin-screw vessel, when the two shaft speeds are within 5% of each other, the bridge may select "shaft synchro-phasing mode". What statement is true regarding the purpose of this operating mode? Illustration EL-0168
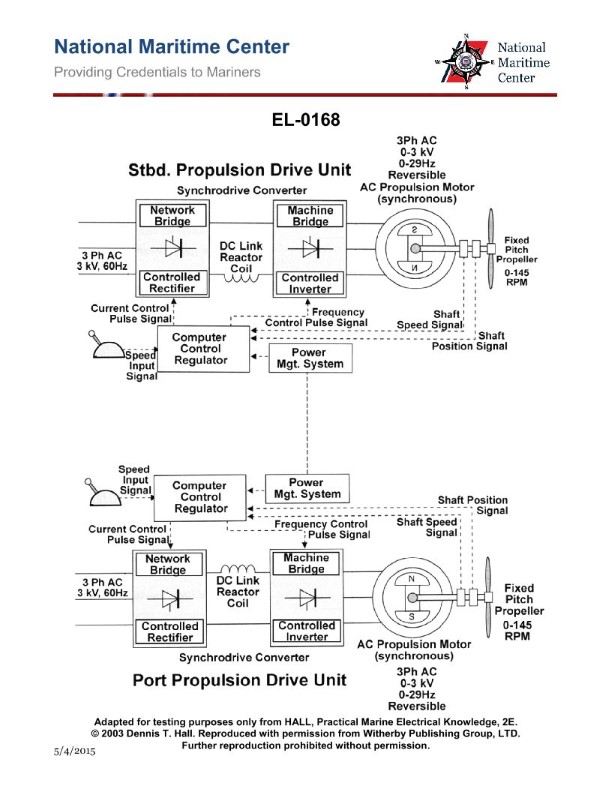
The Correct Answer is A ### Explanation of Correct Option (A) Option A is correct because it accurately describes the function and mechanism of a "shaft synchro-phasing mode" (or propeller synchronization/phasing system) in twin-screw vessels. * **Synchro-phasing** goes beyond simple speed matching (synchronization) by actively controlling the angular relationship (phase) between the two propellers. * **Purpose:** The primary goal of propeller phasing is to reduce hull-induced vibration and noise, which are often caused by the pressure pulses generated by the blades passing the hull structure simultaneously or at destructive phase angles. * **Mechanism:** To achieve this phase control, the system requires both **shaft speed sensors** (to match RPMs identically) and **shaft position/phase sensors** (to determine the angular relationship of the blades relative to each other and maintain the optimal phase angle, usually determined by minimizing measured vibration or noise). Minimizing shaft vibration is the direct result of achieving this synchronization and optimal phasing. ### Explanation of Incorrect Options **B) Vibration sensors are used to achieve identical shaft speeds and propeller synchronization to minimize vibration.** * While minimizing vibration is the goal, vibration sensors are typically used to **tune or confirm** the optimal phase angle. They are **not** the primary feedback sensors used to control and maintain the shaft speed and angular position itself. Speed and position control relies on dedicated shaft speed and position sensors. **C) The respective shaft speed sensors alone are used to achieve identical shaft speeds without regard to propeller position to achieve even power development.** * This description defines standard **synchronization mode** (matching RPMs), not **synchro-phasing mode**. The defining feature of synchro-phasing is the active control and maintenance of the specific **propeller position (phase)**, which this option explicitly excludes. **D) Cavitation sensors are used to achieve identical shaft speeds and propeller synchronization to minimize vibration.** * Cavitation sensors detect the formation of vapor bubbles (cavitation) on the propeller blades, which primarily relates to efficiency and noise stemming from blade design, wake uniformity, and speed. They are not the sensors used to control the synchronization or phasing of the two shafts relative to each other to minimize structural vibration. The system relies on shaft speed/position sensors.
Pass Your Coast Guard Licensing Exams!
Study offline, track your progress, and simulate real exams with the Coast Guard Exams app